|
Isis 3.0 Object Programmers' Reference |
Home |
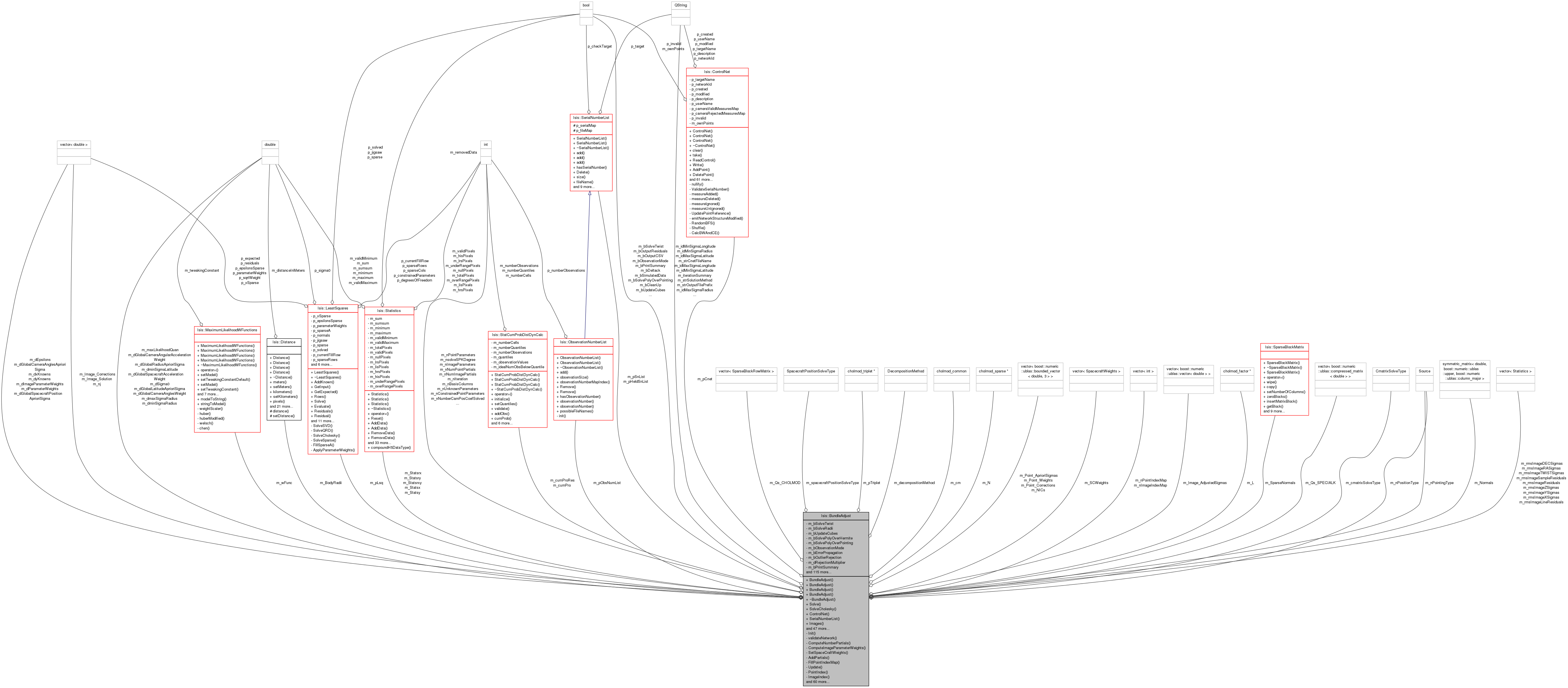
#include <BundleAdjust.h>
Classes | |
| struct | SpacecraftWeights |
Public Member Functions | |
| BundleAdjust (const QString &cnetFile, const QString &cubeList, bool printSummary=true) | |
| BundleAdjust (const QString &cnetFile, const QString &cubeList, const QString &heldList, bool printSummary=true) | |
| BundleAdjust (Isis::ControlNet &cnet, Isis::SerialNumberList &snlist, bool printSummary=true) | |
| BundleAdjust (Isis::ControlNet &cnet, Isis::SerialNumberList &snlist, Isis::SerialNumberList &heldsnlist, bool printSummary=true) | |
| double | Solve () |
| compute partials for measure | |
| bool | SolveCholesky () |
| The solve method is a least squares solution for updating the camera pointing, etc. | |
| Isis::ControlNet * | ControlNet () |
| Isis::SerialNumberList * | SerialNumberList () |
| int | Images () const |
| int | Observations () const |
| Return the number of observations in list given to the constructor. | |
| QString | FileName (int index) |
| Return the ith filename in the cube list file given to constructor. | |
| bool | IsHeld (int index) |
| Return whether the ith file in the cube list is held. | |
| Table | Cmatrix (int index) |
| Return a table cmatrix for the ith cube in the cube list given to the constructor. | |
| Table | SpVector (int index) |
| Return a table spacecraft vector for the ith cube in the cube list given to the constructor. | |
| void | SetSolveTwist (bool solve) |
| void | SetSolveRadii (bool solve) |
| void | SetUpdateCubes (bool update) |
| void | SetSolvePolyOverHermite (bool b) |
| void | SetSolvePolyOverPointing (bool b) |
| void | SetErrorPropagation (bool b) |
| void | SetOutlierRejection (bool b) |
| void | SetRejectionMultiplier (double d) |
| void | SetGlobalLatitudeAprioriSigma (double d) |
| void | SetGlobalLongitudeAprioriSigma (double d) |
| void | SetGlobalRadiiAprioriSigma (double d) |
| void | SetGlobalSpacecraftPositionAprioriSigma (double d) |
| void | SetGlobalSpacecraftVelocityAprioriSigma (double d) |
| void | SetGlobalSpacecraftAccelerationAprioriSigma (double d) |
| void | SetGlobalCameraAnglesAprioriSigma (double d) |
| void | SetGlobalCameraAngularVelocityAprioriSigma (double d) |
| void | SetGlobalCameraAngularAccelerationAprioriSigma (double d) |
| void | SetStandardOutput (bool b) |
| void | SetCSVOutput (bool b) |
| void | SetResidualOutput (bool b) |
| void | SetOutputFilePrefix (const QString &str) |
| void | SetDecompositionMethod (DecompositionMethod method) |
| Set decomposition method. | |
| void | SetSolveCmatrix (CmatrixSolveType type) |
| For which camera angle coefficients do we solve? | |
| void | SetSolveSpacecraftPosition (SpacecraftPositionSolveType type) |
| For which camera position coefficients do we solve? | |
| void | SetCKDegree (int degree) |
| Set the degree of the polynomial to fit to the camera angles. | |
| void | SetSolveCKDegree (int degree) |
| Set the degree of the polynomial to adjust in the solution. | |
| void | SetSPKDegree (int degree) |
| Set the degree of the polynomial to fit to the camera position. | |
| void | SetSolveSPKDegree (int degree) |
| Set the degree of the camera position polynomial to adjust in the solution. | |
| int | BasisColumns () |
| Determine number of columns needed for least squares. | |
| int | ComputeConstrainedParameters () |
| double | Error () const |
| double | Iteration () const |
| int | IgnoredPoints () const |
| int | FixedPoints () const |
| void | SetObservationMode (bool bObservationMode) |
| This method turns on observation mode and creates the observation number list. | |
| void | SetConvergenceThreshold (double d) |
| void | SetMaxIterations (int n) |
| void | SetSolutionMethod (QString str) |
| This method sets the solution method for solving the matrix and fills the point index map, which is dependent on the solution method. | |
| void | GetSparseParameterCorrections () |
| Retrieve parameter correction vector for old sparse least-squares object and parse into m_Image_Corrections and m_Point_Corrections vectors so we can use the same output as SpecialK and Cholmod Sparse solutions. | |
| bool | IsConverged () |
| QString | IterationSummaryGroup () const |
| void | maximumLikelihoodSetup (QList< QString > models, QList< double > quantiles) |
| This method steps up the maximum likelihood estimation solution. | |
Private Member Functions | |
| void | Init (Progress *progress=0) |
| Initialize solution parameters. | |
| bool | validateNetwork () |
| control network validation - on the very real chance that the net has not been checked before running the bundle | |
| void | ComputeNumberPartials () |
| This method determines the number of partials per image and per point. | |
| void | ComputeImageParameterWeights () |
| Weighting for image parameter ComputeNumberPartials must be called first. | |
| void | SetSpaceCraftWeights () |
| void | AddPartials (int nPointIndex) |
| Populate least squares matrix with measures for a point (specific to frame cameras for now). | |
| void | FillPointIndexMap () |
| This method fills the point index map and needs to know the solution method in order to work properly. | |
| void | Update (BasisFunction &basis) |
| This method uses the basis function after the matrix has been solved. | |
| int | PointIndex (int i) const |
| Return index to basis function for ith point. | |
| int | ImageIndex (int i) const |
| Return index to basis function for image with index i. | |
| void | CheckHeldList () |
| This method checks all cube files in the held list to make sure they are in the input list. | |
| void | ApplyHeldList () |
| int | Triangulation (bool bDoApproximation=false) |
| Populate least squares matrix with measures for a point (specific to frame cameras for now). | |
| bool | ApproximatePoint_ClosestApproach (const ControlPoint &rpoint, int nIndex) |
| Calculates approximate point coordinates by the method of the closest approach of two vectors. | |
| bool | TriangulatePoint (const ControlPoint &rpoint) |
| Triangulates an individual point. | |
| bool | TriangulationPartials () |
| bool | SetParameterWeights () |
| set parameter weighting for old SPARSE solution | |
| void | SetPostBundleSigmas () |
| Set parameter sigmas (uncertainties) after bundle. | |
| void | IterationSummary (double avErr, double sigmaXY, double sigmaHat, double sigmaX, double sigmaY) |
| This method creates a iteration summary and creates an iteration group for the Sparse BundleAdjust summary. | |
| void | SpecialKIterationSummary () |
| This method creates a iteration summary and creates an iteration group for the SpecialK solution summary. | |
| bool | Output () |
| Output bundle results to file. | |
| bool | OutputHeader (std::ofstream &fp_out) |
| Output header for bundle results file. | |
| bool | OutputWithErrorPropagation () |
| output bundle results to file with error propagation | |
| bool | OutputNoErrorPropagation () |
| output bundle results to file with error propagation | |
| bool | OutputPointsCSV () |
| output point data to csv file | |
| bool | OutputImagesCSV () |
| output image data to csv file | |
| bool | OutputResiduals () |
| output image coordinate residuals to comma-separated-value file | |
| bool | WrapUp () |
| Bundle wrap up. | |
| bool | ComputeBundleStatistics () |
| flags... | |
| void | Initialize () |
| Initializes matrices and parameters for bundle adjustment. | |
| bool | InitializePointWeights () |
| Initialize point coordinaate weights. | |
| void | InitializePoints () |
| Initializing points. | |
| bool | formNormalEquations () |
| Forming the least-squares normal equations matrix. | |
| void | applyParameterCorrections () |
| apply parameter corrections | |
| bool | errorPropagation () |
| error propagation. | |
| bool | solveSystem () |
| Solve normal equations system. | |
| bool | formNormalEquations_CHOLMOD () |
| Forming the least-squares normal equations matrix via cholmod. | |
| bool | formNormals1_CHOLMOD (boost::numeric::ublas::symmetric_matrix< double, boost::numeric::ublas::upper > &N22, SparseBlockColumnMatrix &N12, boost::numeric::ublas::compressed_vector< double > &n1, boost::numeric::ublas::vector< double > &n2, boost::numeric::ublas::matrix< double > &coeff_image, boost::numeric::ublas::matrix< double > &coeff_point3D, boost::numeric::ublas::vector< double > &coeff_RHS, int nImageIndex) |
| Forming first set of auxiliary matrices for normal equations matrix via cholmod. | |
| bool | formNormals2_CHOLMOD (boost::numeric::ublas::symmetric_matrix< double, boost::numeric::ublas::upper > &N22, SparseBlockColumnMatrix &N12, boost::numeric::ublas::vector< double > &n2, boost::numeric::ublas::vector< double > &nj, int nPointIndex, int i) |
| Forming second set of auxiliary matrices for normal equations matrix via cholmod. | |
| bool | formNormals3_CHOLMOD (boost::numeric::ublas::compressed_vector< double > &n1, boost::numeric::ublas::vector< double > &nj) |
| Apply weighting for spacecraft position, velocity, acceleration and camera angles, angular velocities, angular accelerations if so stipulated (legalese). | |
| bool | solveSystem_CHOLMOD () |
| Solution with CHOLMOD. | |
| void | AmultAdd_CNZRows_CHOLMOD (double alpha, SparseBlockColumnMatrix &A, SparseBlockRowMatrix &B) |
| Dedicated matrix multiplication method. | |
| void | transA_NZ_multAdd_CHOLMOD (double alpha, SparseBlockRowMatrix &A, boost::numeric::ublas::vector< double > &B, boost::numeric::ublas::vector< double > &C) |
| Dedicated matrix multiplication method. | |
| void | applyParameterCorrections_CHOLMOD () |
| apply parameter corrections for CHOLMOD solution. | |
| bool | errorPropagation_CHOLMOD () |
| error propagation for CHOLMOD solution. | |
| bool | formNormalEquations_SPECIALK () |
| Forming the least-squares normal equations matrix via specialk. | |
| bool | formNormals1_SPECIALK (boost::numeric::ublas::symmetric_matrix< double, boost::numeric::ublas::upper > &N22, boost::numeric::ublas::matrix< double > &N12, boost::numeric::ublas::compressed_vector< double > &n1, boost::numeric::ublas::vector< double > &n2, boost::numeric::ublas::matrix< double > &coeff_image, boost::numeric::ublas::matrix< double > &coeff_point3D, boost::numeric::ublas::vector< double > &coeff_RHS, int nImageIndex) |
| Forming first set of auxiliary matrices for normal equations matrix via specialk. | |
| bool | formNormals2_SPECIALK (boost::numeric::ublas::symmetric_matrix< double, boost::numeric::ublas::upper > &N22, boost::numeric::ublas::matrix< double > &N12, boost::numeric::ublas::vector< double > &n2, boost::numeric::ublas::vector< double > &nj, int nPointIndex, int i) |
| Forming second set of auxiliary matrices for normal equations matrix via specialk. | |
| bool | formNormals3_SPECIALK (boost::numeric::ublas::compressed_vector< double > &n1, boost::numeric::ublas::vector< double > &nj) |
| apply weighting for spacecraft position, velocity, acceleration and camera angles, angular velocities, angular accelerations if so stipulated (legalese). | |
| bool | solveSystem_SPECIALK () |
| Solution with specialk (dense). | |
| void | AmultAdd_CNZRows_SPECIALK (double alpha, boost::numeric::ublas::matrix< double > &A, boost::numeric::ublas::compressed_matrix< double > &B, boost::numeric::ublas::symmetric_matrix< double, boost::numeric::ublas::upper, boost::numeric::ublas::column_major > &C) |
| Dedicated matrix multiplication method. | |
| void | transA_NZ_multAdd_SPECIALK (double alpha, boost::numeric::ublas::compressed_matrix< double > &A, boost::numeric::ublas::vector< double > &B, boost::numeric::ublas::vector< double > &C) |
| Dedicated matrix multiplication method. | |
| void | applyParameterCorrections_SPECIALK () |
| Apply parameter corrections for specialk solution. | |
| bool | errorPropagation_SPECIALK () |
| error propagation for specialk solution. | |
| bool | CholeskyUT_NOSQR () |
| Upper triangular, square-root free cholesky. | |
| bool | CholeskyUT_NOSQR_Inverse () |
| Compute inverse of normal equations matrix for above square-root free cholesky method. | |
| bool | CholeskyUT_NOSQR_BackSub (boost::numeric::ublas::symmetric_matrix< double, boost::numeric::ublas::upper, boost::numeric::ublas::column_major > &m, boost::numeric::ublas::vector< double > &s, boost::numeric::ublas::vector< double > &rhs) |
| Backsubstitution for above square-root free cholesky method. | |
| bool | ComputePartials_DC (boost::numeric::ublas::matrix< double > &coeff_image, boost::numeric::ublas::matrix< double > &coeff_point3D, boost::numeric::ublas::vector< double > &coeff_RHS, const ControlMeasure &measure, const ControlPoint &point) |
| compute partials for measure | |
| double | ComputeResiduals () |
| This method computes the focal plane residuals for the measures. | |
| void | AmulttransBNZ (boost::numeric::ublas::matrix< double > &A, boost::numeric::ublas::compressed_matrix< double > &B, boost::numeric::ublas::matrix< double > &C, double alpha=1.0) |
| Dedicated matrix multiplication method. | |
| void | ANZmultAdd (boost::numeric::ublas::compressed_matrix< double > &A, boost::numeric::ublas::symmetric_matrix< double, boost::numeric::ublas::upper, boost::numeric::ublas::column_major > &B, boost::numeric::ublas::matrix< double > &C, double alpha=1.0) |
| Dedicated matrix multiplication method. | |
| bool | Invert_3x3 (boost::numeric::ublas::symmetric_matrix< double, boost::numeric::ublas::upper > &m) |
| Dedicated quick inverse of 3x3 matrix. | |
| bool | product_ATransB (boost::numeric::ublas::symmetric_matrix< double, boost::numeric::ublas::upper > &N22, SparseBlockColumnMatrix &N12, SparseBlockRowMatrix &Q) |
| C = A x B(transpose) where A is a boost matrix B is a SparseBlockColumn matrix C is a SparseBlockRowMatrix each block of B and C are boost matrices. | |
| void | product_AV (double alpha, boost::numeric::ublas::bounded_vector< double, 3 > &v2, SparseBlockRowMatrix &Q, boost::numeric::ublas::vector< double > &v1) |
| Dedicated matrix multiplication method. | |
| bool | ComputeRejectionLimit () |
| Compute rejection limit. | |
| bool | FlagOutliers () |
| Flag outlier measurements. | |
| bool | initializeCholMod () |
| Initializations for Cholmod sparse matrix package. | |
| bool | freeCholMod () |
| Initializations for Cholmod sparse matrix package. | |
| bool | cholmod_Inverse () |
| Computate inverse of normal equations matrix for CHOLMOD. | |
| bool | loadCholmodTriplet () |
| Load sparse normal equations matrix into CHOLMOD triplet. | |
Private Attributes | |
| bool | m_bSolveTwist |
| to solve for "twist" angle | |
| bool | m_bSolveRadii |
| to solve for point radii | |
| bool | m_bUpdateCubes |
| update cubes (only here for output into bundleout.txt) | |
| bool | m_bSolvePolyOverHermite |
| to fit polynomial over existing Hermite | |
| bool | m_bSolvePolyOverPointing |
| to fit polynomial over existing pointing | |
| bool | m_bObservationMode |
| for observation mode (explain this somewhere) | |
| bool | m_bErrorPropagation |
| to perform error propagation | |
| bool | m_bOutlierRejection |
| to perform automatic outlier detection/rejection | |
| double | m_dRejectionMultiplier |
| outlier rejection multiplier | |
| bool | m_bPrintSummary |
| to print summary | |
| bool | m_bOutputStandard |
| to print standard bundle output file (bundleout.txt) | |
| bool | m_bOutputCSV |
| to output points and image station data in csv format | |
| bool | m_bOutputResiduals |
| to output residuals in csv format | |
| bool | m_bCleanUp |
| for cleanup (i.e. in destructor) | |
| bool | m_bSimulatedData |
| indicating simulated (i.e. 'perfect' data) | |
| bool | m_bLastIteration |
| bool | m_bMaxIterationsReached |
| bool | m_bDeltack |
| flag indicating deltack was calling app | |
| int | m_nIteration |
| current iteration | |
| int | m_nMaxIterations |
| maximum iterations | |
| int | m_nNumImagePartials |
| number of image-related partials | |
| int | m_nNumPointPartials |
| number of point-related partials | |
| int | m_nObservations |
| number of image coordinate observations | |
| int | m_nRejectedObservations |
| number of rejected image coordinate observations //! | |
| int | m_nImageParameters |
| number of image parameters | |
| int | m_nPointParameters |
| total number of point parameters (including constrained) | |
| int | m_nConstrainedPointParameters |
| number of constrained point parameters | |
| int | m_nConstrainedImageParameters |
| number of constrained image parameters | |
| int | m_nDegreesOfFreedom |
| degrees of freedom //! | |
| int | m_nHeldPoints |
| number of 'held' points (define) | |
| int | m_nFixedPoints |
| number of 'fixed' (ground) points (define) | |
| int | m_nIgnoredPoints |
| number of ignored points | |
| int | m_nHeldImages |
| number of 'held' images (define) | |
| int | m_nHeldObservations |
| number of 'held' observations (define) | |
| int | m_nCKDegree |
| ck degree (define) | |
| int | m_nsolveCKDegree |
| solve cad degree (define) | |
| int | m_nNumberCamAngleCoefSolved |
| number of camera angle coefficients in solution | |
| int | m_nSPKDegree |
| spk degree (define) | |
| int | m_nsolveSPKDegree |
| solve spk degree (define) | |
| int | m_nNumberCamPosCoefSolved |
| number of camera position coefficients in solution | |
| int | m_nUnknownParameters |
| total number of parameters to solve for | |
| int | m_nBasisColumns |
| number of columns (parameters) in normal equations | |
| SpicePosition::Source | m_nPositionType |
| type of SpicePosition interpolation | |
| SpiceRotation::Source | m_nPointingType |
| type of SpiceRotation interpolation | |
| std::vector< int > | m_nPointIndexMap |
| index into normal equations of point parameter positions | |
| std::vector< int > | m_nImageIndexMap |
| index into normal equations of image parameter positions | |
| double | m_dError |
| error | |
| double | m_dConvergenceThreshold |
| bundle convergence threshold | |
| double | m_dElapsedTime |
| elapsed time for bundle | |
| double | m_dElapsedTimeErrorProp |
| elapsed time for error propagation //! | |
| double | m_dSigma0 |
| std deviation of unit weight | |
| double | m_drms_rx |
| rms of x residuals | |
| double | m_drms_ry |
| rms of y residuals | |
| double | m_drms_rxy |
| rms of all x and y residuals | |
| double | m_drms_sigmaLat |
| rms of adjusted Latitude sigmas | |
| double | m_drms_sigmaLon |
| rms of adjusted Longitude sigmas | |
| double | m_drms_sigmaRad |
| rms of adjusted Radius sigmas | |
| double | m_dminSigmaLatitude |
| QString | m_idMinSigmaLatitude |
| double | m_dmaxSigmaLatitude |
| QString | m_idMaxSigmaLatitude |
| double | m_dminSigmaLongitude |
| QString | m_idMinSigmaLongitude |
| double | m_dmaxSigmaLongitude |
| QString | m_idMaxSigmaLongitude |
| double | m_dminSigmaRadius |
| QString | m_idMinSigmaRadius |
| double | m_dmaxSigmaRadius |
| QString | m_idMaxSigmaRadius |
| double | m_dRejectionLimit |
| current rejection limit | |
| double | m_dGlobalLatitudeAprioriSigma |
| latitude apriori sigma | |
| double | m_dGlobalLongitudeAprioriSigma |
| longitude apriori sigma | |
| double | m_dGlobalRadiusAprioriSigma |
| radius apriori sigma | |
| double | m_dGlobalSurfaceXAprioriSigma |
| surface point x apriori sigma | |
| double | m_dGlobalSurfaceYAprioriSigma |
| surface point y apriori sigma | |
| double | m_dGlobalSurfaceZAprioriSigma |
| surface point z apriori sigma | |
| std::vector< double > | m_dGlobalSpacecraftPositionAprioriSigma |
| camera position apriori sigmas: size is # camera position coefficients solved | |
| std::vector< double > | m_dGlobalCameraAnglesAprioriSigma |
| camera angles apriori sigmas: size is # camera angle coefficients solved | |
| double | m_dGlobalSpacecraftPositionWeight |
| double | m_dGlobalSpacecraftVelocityWeight |
| double | m_dGlobalSpacecraftAccelerationWeight |
| double | m_dGlobalCameraAnglesWeight |
| double | m_dGlobalCameraAngularVelocityWeight |
| double | m_dGlobalCameraAngularAccelerationWeight |
| std::vector< double > | m_dImageParameterWeights |
| double | m_dRTM |
| radians to meters conversion factor (body specific) | |
| double | m_dMTR |
| meters to radians conversion factor (body specific) | |
| Distance | m_BodyRadii [3] |
| body radii i meters | |
| std::vector< double > | m_dEpsilons |
| vector maintaining total corrections to parameters | |
| std::vector< double > | m_dParameterWeights |
| vector of parameter weights | |
| std::vector< double > | m_dxKnowns |
| std::vector< double > | m_dyKnowns |
| QString | m_strCnetFileName |
| Control Net file specification. | |
| QString | m_strSolutionMethod |
| solution method string (QR,SVD,SPARSE-LU,SPECIALK) | |
| QString | m_strOutputFilePrefix |
| output file prefix | |
| Isis::LeastSquares * | m_pLsq |
| < pointers to... | |
| Isis::ControlNet * | m_pCnet |
| 'ControlNet' object | |
| Isis::SerialNumberList * | m_pSnList |
| list of image serial numbers | |
| Isis::SerialNumberList * | m_pHeldSnList |
| list of held image serial numbers | |
| Isis::ObservationNumberList * | m_pObsNumList |
| list of observation numbers | |
| Statistics | m_Statsx |
| x errors | |
| Statistics | m_Statsy |
| y errors | |
| Statistics | m_Statsrx |
| x residuals | |
| Statistics | m_Statsry |
| y residuals | |
| Statistics | m_Statsrxy |
| xy residuals | |
| std::vector< Statistics > | m_rmsImageSampleResiduals |
| std::vector< Statistics > | m_rmsImageLineResiduals |
| std::vector< Statistics > | m_rmsImageResiduals |
| std::vector< Statistics > | m_rmsImageXSigmas |
| std::vector< Statistics > | m_rmsImageYSigmas |
| std::vector< Statistics > | m_rmsImageZSigmas |
| std::vector< Statistics > | m_rmsImageRASigmas |
| std::vector< Statistics > | m_rmsImageDECSigmas |
| std::vector< Statistics > | m_rmsImageTWISTSigmas |
| DecompositionMethod | m_decompositionMethod |
| matrix decomp method | |
| CmatrixSolveType | m_cmatrixSolveType |
| cmatrix solve type (define) | |
| SpacecraftPositionSolveType | m_spacecraftPositionSolveType |
| spacecraft position solve type (define) | |
| std::vector< SpacecraftWeights > | m_SCWeights |
| int | m_nRank |
| bool | m_bConverged |
| bool | m_bError |
| boost::numeric::ublas::symmetric_matrix < double, boost::numeric::ublas::upper, boost::numeric::ublas::column_major > | m_Normals |
| reduced normal equations matrix | |
| boost::numeric::ublas::vector < double > | m_nj |
| array of Qs (see Brown, 1976) | |
|
std::vector < boost::numeric::ublas::compressed_matrix < double > > | m_Qs_SPECIALK |
| std::vector< SparseBlockRowMatrix > | m_Qs_CHOLMOD |
| array of NICs (see Brown, 1976) | |
|
std::vector < boost::numeric::ublas::bounded_vector < double, 3 > > | m_NICs |
| boost::numeric::ublas::vector < double > | m_Image_Corrections |
| image parameter cumulative correction vector | |
| boost::numeric::ublas::vector < double > | m_Image_Solution |
| image parameter solution vector | |
| std::vector < boost::numeric::ublas::bounded_vector < double, 3 > > | m_Point_Corrections |
| vector of corrections to 3D point parameter | |
| std::vector < boost::numeric::ublas::bounded_vector < double, 3 > > | m_Point_AprioriSigmas |
| vector of apriori sigmas for 3D point parameters | |
| std::vector < boost::numeric::ublas::bounded_vector < double, 3 > > | m_Point_Weights |
| vector of weights for 3D point parameters | |
| std::vector < boost::numeric::ublas::vector < double > > | m_Image_AdjustedSigmas |
| vector of a posteriori (adjusted image parameter sigmas | |
| QString | m_iterationSummary |
| cholmod_common | m_cm |
| cholmod_factor * | m_L |
| cholmod_sparse * | m_N |
| SparseBlockMatrix | m_SparseNormals |
| cholmod_triplet * | m_pTriplet |
| MaximumLikelihoodWFunctions * | m_wFunc [3] |
| This class is used to reweight observations in order to achieve more robust parameter estimation, up to three different maximum likelihood estimation models can be used in succession. | |
| StatCumProbDistDynCalc * | m_cumPro |
| This class will be used to calculate the cumulative probability distribution of |R^2 residuals|, quantiles of this distribution are used to adjust the maximum likelihood functions dynamically iteration by iteration. | |
| StatCumProbDistDynCalc * | m_cumProRes |
| This class keeps track of the cumulative probability distribution of residuals (in unweighted pixels), this is used for reporting, and not for computation. | |
| bool | m_maxLikelihoodFlag [3] |
| Up to three different maximum likelihood estimation models can be used in succession, these flags record if they are enabled . | |
| int | m_maxLikelihoodIndex |
| This count keeps track of which stadge of the maximum likelihood adjustment the bundle is currently on. | |
| double | m_maxLikelihoodQuan [3] |
| Quantiles of the |residual| distribution to be used for tweaking constants of the maximum probability models. | |
| double | m_maxLikelihoodMedianR2Residuals |
| Median of R^2 residuals. | |
Definition at line 172 of file BundleAdjust.h.
|
private |
Populate least squares matrix with measures for a point (specific to frame cameras for now).
Definition at line 3703 of file BundleAdjust.cpp.
References _FILEINFO_, Isis::Camera::GetCameraType(), Isis::ControlMeasure::GetCubeSerialNumber(), Isis::CameraGroundMap::GetdXYdOrientation(), Isis::CameraGroundMap::GetdXYdPoint(), Isis::CameraGroundMap::GetdXYdPosition(), Isis::ControlPoint::GetId(), Isis::ControlPoint::GetMeasure(), Isis::ControlPoint::GetType(), Isis::CameraGroundMap::GetXY(), Isis::Camera::GroundMap(), Isis::Camera::PixelPitch(), Isis::CameraGroundMap::PointPartial(), and Isis::Camera::SetImage().
|
private |
Dedicated matrix multiplication method.
TODO: Define.
NOTE: A = N12, B = Q
Definition at line 2122 of file BundleAdjust.cpp.
|
private |
Dedicated matrix multiplication method.
TODO: Define.
Definition at line 2163 of file BundleAdjust.cpp.
|
private |
Dedicated matrix multiplication method.
TODO: Define.
Definition at line 2280 of file BundleAdjust.cpp.
|
private |
Dedicated matrix multiplication method.
TODO: Define.
Definition at line 2330 of file BundleAdjust.cpp.
|
private |
apply parameter corrections
Definition at line 4549 of file BundleAdjust.cpp.
|
private |
apply parameter corrections for CHOLMOD solution.
Definition at line 4560 of file BundleAdjust.cpp.
References Isis::Camera::Camera(), Isis::Angle::degrees(), Isis::SurfacePoint::GetLatitude(), Isis::SurfacePoint::GetLocalRadius(), Isis::SurfacePoint::GetLongitude(), Isis::SpicePosition::GetPolynomial(), Isis::SpiceRotation::GetPolynomial(), Isis::Spice::instrumentPosition(), Isis::Spice::instrumentRotation(), Isis::Distance::meters(), Isis::RAD2DEG(), Isis::ControlPoint::SetAdjustedSurfacePoint(), Isis::SpicePosition::SetPolynomial(), Isis::SpiceRotation::SetPolynomial(), and Isis::SurfacePoint::SetSphericalCoordinates().
|
private |
Apply parameter corrections for specialk solution.
Definition at line 4753 of file BundleAdjust.cpp.
References Isis::Camera::Camera(), Isis::Angle::degrees(), Isis::SurfacePoint::GetLatitude(), Isis::SurfacePoint::GetLocalRadius(), Isis::SurfacePoint::GetLongitude(), Isis::SpicePosition::GetPolynomial(), Isis::SpiceRotation::GetPolynomial(), Isis::Spice::instrumentPosition(), Isis::Spice::instrumentRotation(), Isis::Distance::meters(), Isis::RAD2DEG(), Isis::ControlPoint::SetAdjustedSurfacePoint(), Isis::SpicePosition::SetPolynomial(), Isis::SpiceRotation::SetPolynomial(), and Isis::SurfacePoint::SetSphericalCoordinates().
|
private |
Calculates approximate point coordinates by the method of the closest approach of two vectors.
| rpoint | reference to control point |
| maxIterations | Maximum iterations, if tolerance is never met an iException will be thrown. |
Definition at line 4308 of file BundleAdjust.cpp.
References Isis::Spice::bodyRotation(), Isis::Camera::DistortionMap(), Isis::Camera::FocalPlaneMap(), Isis::SurfacePoint::GetLatitude(), Isis::SurfacePoint::GetLocalRadius(), Isis::SurfacePoint::GetLongitude(), Isis::ControlPoint::GetMeasure(), Isis::Spice::instrumentPosition(), Isis::Spice::instrumentRotation(), Isis::SpiceRotation::J2000Vector(), Isis::Distance::kilometers(), Isis::Angle::radians(), Isis::SpiceRotation::ReferenceVector(), Isis::Camera::SetImage(), Isis::CameraDistortionMap::UndistortedFocalPlaneX(), Isis::CameraDistortionMap::UndistortedFocalPlaneY(), and Isis::CameraDistortionMap::UndistortedFocalPlaneZ().
| int Isis::BundleAdjust::BasisColumns | ( | ) |
Determine number of columns needed for least squares.
When we create a row of data we store all image partials first and then the point partials.
Definition at line 738 of file BundleAdjust.cpp.
|
private |
This method checks all cube files in the held list to make sure they are in the input list.
Definition at line 474 of file BundleAdjust.cpp.
References _FILEINFO_.
|
private |
Upper triangular, square-root free cholesky.
Definition at line 2602 of file BundleAdjust.cpp.
|
private |
Backsubstitution for above square-root free cholesky method.
Definition at line 2689 of file BundleAdjust.cpp.
|
private |
Compute inverse of normal equations matrix for above square-root free cholesky method.
Definition at line 2727 of file BundleAdjust.cpp.
|
private |
Computate inverse of normal equations matrix for CHOLMOD.
Definition at line 2786 of file BundleAdjust.cpp.
| Table Isis::BundleAdjust::Cmatrix | ( | int | index | ) |
Return a table cmatrix for the ith cube in the cube list given to the constructor.
Definition at line 6085 of file BundleAdjust.cpp.
|
private |
flags...
Compute Bundle statistics.
Definition at line 5092 of file BundleAdjust.cpp.
References Isis::Statistics::AddData(), Isis::ControlMeasure::GetCubeSerialNumber(), Isis::ControlPoint::GetId(), Isis::SurfacePoint::GetLatSigmaDistance(), Isis::SurfacePoint::GetLonSigmaDistance(), Isis::ControlPoint::GetMeasure(), Isis::Distance::meters(), and Isis::Statistics::Rms().
|
private |
Weighting for image parameter ComputeNumberPartials must be called first.
Definition at line 542 of file BundleAdjust.cpp.
|
private |
This method determines the number of partials per image and per point.
It is based on the variables to be solved for (e.g., twist, radii, cmatrix velocity, cmatrix acceleration, degree of camera position polynomial, etc).
Definition at line 490 of file BundleAdjust.cpp.
|
private |
compute partials for measure
Definition at line 2861 of file BundleAdjust.cpp.
References _FILEINFO_, Isis::Camera::GetCameraType(), Isis::ControlMeasure::GetCubeSerialNumber(), Isis::CameraGroundMap::GetdXYdOrientation(), Isis::CameraGroundMap::GetdXYdPoint(), Isis::CameraGroundMap::GetdXYdPosition(), Isis::ControlPoint::GetId(), Isis::CameraGroundMap::GetXY(), Isis::Camera::GroundMap(), Isis::Camera::PixelPitch(), Isis::CameraGroundMap::PointPartial(), and Isis::Camera::SetImage().
|
private |
Compute rejection limit.
Definition at line 5229 of file BundleAdjust.cpp.
References Isis::ControlPoint::GetMeasure().
|
private |
This method computes the focal plane residuals for the measures.
Definition at line 4951 of file BundleAdjust.cpp.
References Isis::ControlPoint::ComputeResiduals(), and Isis::ControlPoint::GetMeasure().
|
private |
error propagation.
Definition at line 5452 of file BundleAdjust.cpp.
|
private |
error propagation for CHOLMOD solution.
Definition at line 5650 of file BundleAdjust.cpp.
References Isis::iTime::CurrentLocalTime(), Isis::SurfacePoint::GetLatitude(), Isis::Distance::meters(), Isis::SparseBlockColumnMatrix::numberOfColumns(), Isis::SparseBlockColumnMatrix::numberOfRows(), Isis::Angle::radians(), Isis::ControlPoint::SetAdjustedSurfacePoint(), and Isis::SurfacePoint::SetSphericalSigmasDistance().
|
private |
error propagation for specialk solution.
Definition at line 5465 of file BundleAdjust.cpp.
References Isis::SurfacePoint::GetLatitude(), Isis::Distance::meters(), Isis::Angle::radians(), Isis::ControlPoint::SetAdjustedSurfacePoint(), and Isis::SurfacePoint::SetSphericalSigmasDistance().
| QString Isis::BundleAdjust::FileName | ( | int | index | ) |
Return the ith filename in the cube list file given to constructor.
Definition at line 6062 of file BundleAdjust.cpp.
|
private |
This method fills the point index map and needs to know the solution method in order to work properly.
Definition at line 432 of file BundleAdjust.cpp.
References Isis::ControlPoint::GetType().
|
private |
Flag outlier measurements.
Definition at line 5334 of file BundleAdjust.cpp.
References Isis::ControlMeasure::GetCubeSerialNumber(), Isis::ControlPoint::GetId(), Isis::ControlPoint::GetMeasure(), Isis::ControlPoint::SetNumberOfRejectedMeasures(), Isis::ControlMeasure::SetRejected(), Isis::ControlPoint::SetRejected(), and Isis::ControlPoint::ZeroNumberOfRejectedMeasures().
|
private |
Forming the least-squares normal equations matrix.
Definition at line 1199 of file BundleAdjust.cpp.
|
private |
Forming the least-squares normal equations matrix via cholmod.
Definition at line 1225 of file BundleAdjust.cpp.
References Isis::ControlMeasure::GetCubeSerialNumber(), Isis::ControlPoint::GetMeasure(), and Isis::SparseBlockColumnMatrix::wipe().
|
private |
Forming the least-squares normal equations matrix via specialk.
Definition at line 1589 of file BundleAdjust.cpp.
References Isis::ControlMeasure::GetCubeSerialNumber(), and Isis::ControlPoint::GetMeasure().
|
private |
Forming first set of auxiliary matrices for normal equations matrix via cholmod.
Definition at line 1372 of file BundleAdjust.cpp.
References Isis::SparseBlockColumnMatrix::insertMatrixBlock().
|
private |
Forming first set of auxiliary matrices for normal equations matrix via specialk.
Definition at line 1727 of file BundleAdjust.cpp.
|
private |
Forming second set of auxiliary matrices for normal equations matrix via cholmod.
Definition at line 1452 of file BundleAdjust.cpp.
References Isis::ControlPoint::SetAdjustedSurfacePoint(), Isis::SurfacePoint::SetSphericalMatrix(), and Isis::SparseBlockRowMatrix::zeroBlocks().
|
private |
Forming second set of auxiliary matrices for normal equations matrix via specialk.
Definition at line 1800 of file BundleAdjust.cpp.
References Isis::ControlPoint::SetAdjustedSurfacePoint(), and Isis::SurfacePoint::SetSphericalMatrix().
|
private |
Apply weighting for spacecraft position, velocity, acceleration and camera angles, angular velocities, angular accelerations if so stipulated (legalese).
Definition at line 1554 of file BundleAdjust.cpp.
|
private |
apply weighting for spacecraft position, velocity, acceleration and camera angles, angular velocities, angular accelerations if so stipulated (legalese).
Definition at line 1899 of file BundleAdjust.cpp.
|
private |
Initializations for Cholmod sparse matrix package.
Definition at line 416 of file BundleAdjust.cpp.
| void Isis::BundleAdjust::GetSparseParameterCorrections | ( | ) |
Retrieve parameter correction vector for old sparse least-squares object and parse into m_Image_Corrections and m_Point_Corrections vectors so we can use the same output as SpecialK and Cholmod Sparse solutions.
Definition at line 3663 of file BundleAdjust.cpp.
|
private |
Return index to basis function for image with index i.
Definition at line 6050 of file BundleAdjust.cpp.
|
private |
Initialize solution parameters.
Definition at line 208 of file BundleAdjust.cpp.
References Isis::Camera::Camera(), and Isis::Spice::radii().
|
private |
Initializes matrices and parameters for bundle adjustment.
Definition at line 755 of file BundleAdjust.cpp.
|
private |
Initializations for Cholmod sparse matrix package.
Definition at line 390 of file BundleAdjust.cpp.
|
private |
Initializing points.
This method will definitely need to be revisited.
Definition at line 2050 of file BundleAdjust.cpp.
References Isis::ControlPoint::SetAdjustedSurfacePoint().
|
private |
Initialize point coordinaate weights.
Definition at line 1931 of file BundleAdjust.cpp.
References Isis::SurfacePoint::GetLatSigmaDistance(), Isis::SurfacePoint::GetLatWeight(), Isis::SurfacePoint::GetLocalRadiusWeight(), Isis::SurfacePoint::GetLonSigmaDistance(), Isis::SurfacePoint::GetLonWeight(), Isis::ControlPoint::GetType(), and Isis::Distance::meters().
|
private |
Dedicated quick inverse of 3x3 matrix.
TODO: belongs in matrix class or wrapper.
Definition at line 2831 of file BundleAdjust.cpp.
| bool Isis::BundleAdjust::IsHeld | ( | int | index | ) |
Return whether the ith file in the cube list is held.
Definition at line 6073 of file BundleAdjust.cpp.
|
private |
This method creates a iteration summary and creates an iteration group for the Sparse BundleAdjust summary.
| it | Iteration number |
| it_time | Iteration time |
| avErr | Average error or iteration (pixels) |
| sigmaXY | Standard deviation of coordinates (mm) |
| sigmaHat | Aposteriori standard deviation of unit weight (mm) |
| sigmaX | Standard deviation of deltax (mm) |
| sigmaY | Standard deviation of deltay (mm) |
Definition at line 6158 of file BundleAdjust.cpp.
References Isis::toString().
|
private |
Load sparse normal equations matrix into CHOLMOD triplet.
Definition at line 2466 of file BundleAdjust.cpp.
| void Isis::BundleAdjust::maximumLikelihoodSetup | ( | QList< QString > | models, |
| QList< double > | quantiles | ||
| ) |
This method steps up the maximum likelihood estimation solution.
Zero to three successive solutions models are available.
Definition at line 8845 of file BundleAdjust.cpp.
References _FILEINFO_.
| int Isis::BundleAdjust::Observations | ( | ) | const |
Return the number of observations in list given to the constructor.
Definition at line 6100 of file BundleAdjust.cpp.
|
private |
Output bundle results to file.
Definition at line 6400 of file BundleAdjust.cpp.
|
private |
Output header for bundle results file.
Definition at line 6424 of file BundleAdjust.cpp.
References _FILEINFO_, and Isis::iTime::CurrentLocalTime().
|
private |
output image data to csv file
Definition at line 8285 of file BundleAdjust.cpp.
References Isis::Camera::Camera(), Isis::Camera::GetCameraType(), Isis::SpiceRotation::GetCenterAngles(), Isis::SpicePosition::GetCenterCoordinate(), Isis::SpicePosition::GetPolynomial(), Isis::SpiceRotation::GetPolynomial(), Isis::Spice::instrumentPosition(), Isis::Spice::instrumentRotation(), Isis::RAD2DEG(), and Isis::toString().
|
private |
output bundle results to file with error propagation
output bundle results to file with no error propagation
Definition at line 7722 of file BundleAdjust.cpp.
References Isis::Camera::Camera(), Isis::DEG2RAD(), Isis::Angle::degrees(), Isis::SpiceRotation::GetCenterAngles(), Isis::SpicePosition::GetCenterCoordinate(), Isis::ControlPoint::GetId(), Isis::SurfacePoint::GetLatitude(), Isis::SurfacePoint::GetLocalRadius(), Isis::SurfacePoint::GetLongitude(), Isis::ControlPoint::GetNumberOfRejectedMeasures(), Isis::SpicePosition::GetPolynomial(), Isis::SpiceRotation::GetPolynomial(), Isis::ControlPoint::GetResidualRms(), Isis::ControlPoint::GetType(), Isis::Spice::instrumentPosition(), Isis::Spice::instrumentRotation(), Isis::Distance::meters(), and Isis::RAD2DEG().
|
private |
output point data to csv file
Definition at line 8115 of file BundleAdjust.cpp.
References Isis::DEG2RAD(), Isis::Angle::degrees(), Isis::ControlPoint::GetId(), Isis::SurfacePoint::GetLatitude(), Isis::SurfacePoint::GetLatSigmaDistance(), Isis::SurfacePoint::GetLocalRadius(), Isis::SurfacePoint::GetLongitude(), Isis::SurfacePoint::GetLonSigmaDistance(), Isis::ControlPoint::GetNumberOfRejectedMeasures(), Isis::ControlPoint::GetResidualRms(), Isis::ControlPoint::GetType(), Isis::Displacement::kilometers(), Isis::Distance::kilometers(), and Isis::Distance::meters().
|
private |
output image coordinate residuals to comma-separated-value file
Definition at line 8220 of file BundleAdjust.cpp.
References Isis::ControlMeasure::GetCubeSerialNumber(), Isis::ControlPoint::GetId(), Isis::ControlPoint::GetMeasure(), and Isis::ControlMeasure::GetResidualMagnitude().
|
private |
output bundle results to file with error propagation
Definition at line 6745 of file BundleAdjust.cpp.
References Isis::Camera::Camera(), Isis::DEG2RAD(), Isis::Angle::degrees(), Isis::SpiceRotation::GetCenterAngles(), Isis::SpicePosition::GetCenterCoordinate(), Isis::ControlPoint::GetId(), Isis::SurfacePoint::GetLatitude(), Isis::SurfacePoint::GetLatSigmaDistance(), Isis::SurfacePoint::GetLocalRadius(), Isis::SurfacePoint::GetLongitude(), Isis::SurfacePoint::GetLonSigmaDistance(), Isis::ControlPoint::GetNumberOfRejectedMeasures(), Isis::SpicePosition::GetPolynomial(), Isis::SpiceRotation::GetPolynomial(), Isis::ControlPoint::GetResidualRms(), Isis::ControlPoint::GetType(), Isis::Spice::instrumentPosition(), Isis::Spice::instrumentRotation(), Isis::Distance::meters(), and Isis::RAD2DEG().
|
private |
Return index to basis function for ith point.
Definition at line 6032 of file BundleAdjust.cpp.
|
private |
C = A x B(transpose) where A is a boost matrix B is a SparseBlockColumn matrix C is a SparseBlockRowMatrix each block of B and C are boost matrices.
Definition at line 2095 of file BundleAdjust.cpp.
References Isis::SparseBlockRowMatrix::insertMatrixBlock().
|
private |
Dedicated matrix multiplication method.
TODO: Define.
Definition at line 2071 of file BundleAdjust.cpp.
|
inline |
Set the degree of the polynomial to fit to the camera angles.
Definition at line 273 of file BundleAdjust.h.
References m_nCKDegree.
| void Isis::BundleAdjust::SetDecompositionMethod | ( | DecompositionMethod | method | ) |
Set decomposition method.
Choices are... SpecialK (dense normal equations matrix) Sparse (Cholmod sparse normal equations matrix)
Definition at line 652 of file BundleAdjust.cpp.
| void Isis::BundleAdjust::SetObservationMode | ( | bool | observationMode | ) |
This method turns on observation mode and creates the observation number list.
It also checks to make sure the held image list is consistent for all images in an observation.
Is this still going to be necessary. Is the code that uses it still intact?
Definition at line 617 of file BundleAdjust.cpp.
References _FILEINFO_.
|
private |
set parameter weighting for old SPARSE solution
Definition at line 6230 of file BundleAdjust.cpp.
References Isis::SurfacePoint::GetLatSigmaDistance(), Isis::SurfacePoint::GetLatWeight(), Isis::SurfacePoint::GetLocalRadiusWeight(), Isis::SurfacePoint::GetLonSigmaDistance(), Isis::SurfacePoint::GetLonWeight(), Isis::ControlPoint::GetType(), and Isis::Distance::meters().
|
private |
Set parameter sigmas (uncertainties) after bundle.
Definition at line 6357 of file BundleAdjust.cpp.
References Isis::SurfacePoint::GetLatitude(), Isis::Angle::radians(), Isis::ControlPoint::SetAdjustedSurfacePoint(), and Isis::SurfacePoint::SetSphericalSigmasDistance().
| void Isis::BundleAdjust::SetSolutionMethod | ( | QString | str | ) |
This method sets the solution method for solving the matrix and fills the point index map, which is dependent on the solution method.
Definition at line 8836 of file BundleAdjust.cpp.
|
inline |
Set the degree of the polynomial to adjust in the solution.
Definition at line 276 of file BundleAdjust.h.
References m_nsolveCKDegree.
| void Isis::BundleAdjust::SetSolveCmatrix | ( | CmatrixSolveType | type | ) |
For which camera angle coefficients do we solve?
Definition at line 660 of file BundleAdjust.cpp.
References _FILEINFO_, and Isis::toString().
| void Isis::BundleAdjust::SetSolveSpacecraftPosition | ( | SpacecraftPositionSolveType | type | ) |
For which camera position coefficients do we solve?
Definition at line 698 of file BundleAdjust.cpp.
References _FILEINFO_, and Isis::toString().
|
inline |
Set the degree of the camera position polynomial to adjust in the solution.
Definition at line 283 of file BundleAdjust.h.
References m_nsolveSPKDegree.
|
inline |
Set the degree of the polynomial to fit to the camera position.
Definition at line 279 of file BundleAdjust.h.
References m_nSPKDegree.
| double Isis::BundleAdjust::Solve | ( | ) |
compute partials for measure
The solve method is an least squares solution for updating the camera pointing, etc. It is iterative as the equations are non-linear. During each iteration it is updating portions of the control net, as well as the instrument pointing/position in the camera. If it doesn't converge to a solution in maxIterations it will throw an error. However, even if an error is thrown the control network will contain the errors (residuals) at each control measure.
| tol | Maximum pixel error for any control network measurement |
| maxIterations | Maximum iterations, if tolerance is never met an iException will be thrown. |
Definition at line 3385 of file BundleAdjust.cpp.
References _FILEINFO_, Isis::Camera::Camera(), Isis::SpicePosition::GetBaseTime(), Isis::SpiceRotation::GetBaseTime(), Isis::SpicePosition::GetPolynomial(), Isis::SpiceRotation::GetPolynomial(), Isis::SpicePosition::GetTimeScale(), Isis::SpiceRotation::GetTimeScale(), Isis::Spice::instrumentPosition(), Isis::Spice::instrumentRotation(), Isis::LeastSquares::QRD, Isis::SpicePosition::SetOverrideBaseTime(), Isis::SpiceRotation::SetOverrideBaseTime(), Isis::SpicePosition::SetPolynomial(), Isis::SpiceRotation::SetPolynomial(), Isis::SpicePosition::SetPolynomialDegree(), Isis::SpiceRotation::SetPolynomialDegree(), Isis::Progress::SetText(), Isis::LeastSquares::SPARSE, Isis::LeastSquares::SVD, and Isis::toString().
| bool Isis::BundleAdjust::SolveCholesky | ( | ) |
The solve method is a least squares solution for updating the camera pointing, etc.
It is iterative as the equations are non-linear. If it doesn't iterate to a solution in maxIterations it will throw an error. During each iteration it is updating portions of the control net, as well as the instrument pointing in the camera. An error is thrown if it does not converge within the maximum iterations. However, even if an error is thrown the control network will contain the errors (residuals) for each control measure.
| tol | Maximum pixel error for any control network measurement |
| maxIterations | Maximum iterations, if tolerance is never met an iException will be thrown. |
Definition at line 883 of file BundleAdjust.cpp.
References _FILEINFO_, Isis::Camera::Camera(), Isis::SpicePosition::GetBaseTime(), Isis::SpiceRotation::GetBaseTime(), Isis::SpicePosition::GetPolynomial(), Isis::SpiceRotation::GetPolynomial(), Isis::SpicePosition::GetTimeScale(), Isis::SpiceRotation::GetTimeScale(), Isis::Spice::instrumentPosition(), Isis::Spice::instrumentRotation(), Isis::SpicePosition::SetOverrideBaseTime(), Isis::SpiceRotation::SetOverrideBaseTime(), Isis::SpicePosition::SetPolynomial(), Isis::SpiceRotation::SetPolynomial(), Isis::SpicePosition::SetPolynomialDegree(), Isis::SpiceRotation::SetPolynomialDegree(), and Isis::toString().
|
private |
Solve normal equations system.
Definition at line 1212 of file BundleAdjust.cpp.
|
private |
|
private |
Solution with specialk (dense).
Definition at line 2569 of file BundleAdjust.cpp.
|
private |
This method creates a iteration summary and creates an iteration group for the SpecialK solution summary.
Definition at line 6188 of file BundleAdjust.cpp.
References Isis::toString().
| Table Isis::BundleAdjust::SpVector | ( | int | index | ) |
Return a table spacecraft vector for the ith cube in the cube list given to the constructor.
Definition at line 6091 of file BundleAdjust.cpp.
|
private |
Dedicated matrix multiplication method.
TODO: Define.
Definition at line 2209 of file BundleAdjust.cpp.
|
private |
Dedicated matrix multiplication method.
TODO: Define.
Definition at line 2238 of file BundleAdjust.cpp.
|
private |
Triangulates an individual point.
| rpoint | reference to control point |
| maxIterations | Maximum iterations, if tolerance is never met an iException will be thrown. |
Definition at line 4295 of file BundleAdjust.cpp.
|
private |
Populate least squares matrix with measures for a point (specific to frame cameras for now).
Triangulates all points (including control points).
| tol | Maximum pixel error for any control network measurement |
| maxIterations | Maximum iterations, if tolerance is never met an iException will be thrown. |
Definition at line 4253 of file BundleAdjust.cpp.
|
private |
This method uses the basis function after the matrix has been solved.
The coefficients of the basis function represent the new right ascension, declination, and twist values of the camera. Each is a polynomial based on time. For example, ra = A + B * (t - t0) + C * (t - t0)^2. However, as the function we were solving was non-linear we had to take the derivative to linearize. Therefore we have the change in ra, dec, and twist. Really we have the change in A, B, and C.
Definition at line 5892 of file BundleAdjust.cpp.
References Isis::Camera::Camera(), Isis::BasisFunction::Coefficient(), Isis::DEG2RAD(), Isis::Angle::degrees(), Isis::SurfacePoint::GetLatitude(), Isis::SurfacePoint::GetLocalRadius(), Isis::SurfacePoint::GetLongitude(), Isis::SpicePosition::GetPolynomial(), Isis::SpiceRotation::GetPolynomial(), Isis::ControlPoint::GetType(), Isis::Spice::instrumentPosition(), Isis::Spice::instrumentRotation(), Isis::Distance::meters(), Isis::RAD2DEG(), Isis::ControlPoint::SetAdjustedSurfacePoint(), Isis::SpicePosition::SetPolynomial(), Isis::SpiceRotation::SetPolynomial(), and Isis::SurfacePoint::SetSphericalCoordinates().
|
private |
control network validation - on the very real chance that the net has not been checked before running the bundle
checks implemented for ... (1) images with 0 or 1 measures
Definition at line 362 of file BundleAdjust.cpp.
References _FILEINFO_, and Isis::toString().
|
private |
Bundle wrap up.
Definition at line 5069 of file BundleAdjust.cpp.
References Isis::ControlPoint::ComputeResiduals().
|
private |
for cleanup (i.e. in destructor)
Definition at line 362 of file BundleAdjust.h.
|
private |
flag indicating deltack was calling app
Definition at line 366 of file BundleAdjust.h.
|
private |
to perform error propagation
Definition at line 355 of file BundleAdjust.h.
|
private |
for observation mode (explain this somewhere)
Definition at line 354 of file BundleAdjust.h.
|
private |
body radii i meters
Definition at line 456 of file BundleAdjust.h.
|
private |
to perform automatic outlier detection/rejection
Definition at line 356 of file BundleAdjust.h.
|
private |
to output points and image station data in csv format
Definition at line 360 of file BundleAdjust.h.
|
private |
to output residuals in csv format
Definition at line 361 of file BundleAdjust.h.
|
private |
to print standard bundle output file (bundleout.txt)
Definition at line 359 of file BundleAdjust.h.
|
private |
to print summary
Definition at line 358 of file BundleAdjust.h.
|
private |
indicating simulated (i.e. 'perfect' data)
Definition at line 363 of file BundleAdjust.h.
|
private |
to fit polynomial over existing Hermite
Definition at line 352 of file BundleAdjust.h.
|
private |
to fit polynomial over existing pointing
Definition at line 353 of file BundleAdjust.h.
|
private |
to solve for point radii
Definition at line 350 of file BundleAdjust.h.
|
private |
to solve for "twist" angle
Definition at line 349 of file BundleAdjust.h.
|
private |
update cubes (only here for output into bundleout.txt)
Definition at line 351 of file BundleAdjust.h.
|
private |
cmatrix solve type (define)
Definition at line 495 of file BundleAdjust.h.
|
private |
This class will be used to calculate the cumulative probability distribution of |R^2 residuals|, quantiles of this distribution are used to adjust the maximum likelihood functions dynamically iteration by iteration.
Definition at line 677 of file BundleAdjust.h.
|
private |
This class keeps track of the cumulative probability distribution of residuals (in unweighted pixels), this is used for reporting, and not for computation.
Definition at line 682 of file BundleAdjust.h.
|
private |
bundle convergence threshold
Definition at line 399 of file BundleAdjust.h.
|
private |
matrix decomp method
Definition at line 493 of file BundleAdjust.h.
|
private |
elapsed time for bundle
Definition at line 400 of file BundleAdjust.h.
|
private |
elapsed time for error propagation //!
Definition at line 401 of file BundleAdjust.h.
|
private |
vector maintaining total corrections to parameters
Definition at line 458 of file BundleAdjust.h.
|
private |
error
Definition at line 398 of file BundleAdjust.h.
|
private |
camera angles apriori sigmas: size is # camera angle coefficients solved
Definition at line 440 of file BundleAdjust.h.
|
private |
latitude apriori sigma
Definition at line 428 of file BundleAdjust.h.
|
private |
longitude apriori sigma
Definition at line 429 of file BundleAdjust.h.
|
private |
radius apriori sigma
Definition at line 430 of file BundleAdjust.h.
|
private |
camera position apriori sigmas: size is # camera position coefficients solved
Definition at line 435 of file BundleAdjust.h.
|
private |
surface point x apriori sigma
Definition at line 431 of file BundleAdjust.h.
|
private |
surface point y apriori sigma
Definition at line 432 of file BundleAdjust.h.
|
private |
surface point z apriori sigma
Definition at line 433 of file BundleAdjust.h.
|
private |
meters to radians conversion factor (body specific)
Definition at line 455 of file BundleAdjust.h.
|
private |
vector of parameter weights
Definition at line 459 of file BundleAdjust.h.
|
private |
current rejection limit
apriori sigmas from user interface < for points, these override values control-net except for "held" & "fixed" points
Definition at line 422 of file BundleAdjust.h.
|
private |
outlier rejection multiplier
Definition at line 357 of file BundleAdjust.h.
|
private |
rms of x residuals
Definition at line 403 of file BundleAdjust.h.
|
private |
rms of all x and y residuals
Definition at line 405 of file BundleAdjust.h.
|
private |
rms of y residuals
Definition at line 404 of file BundleAdjust.h.
|
private |
rms of adjusted Latitude sigmas
Definition at line 406 of file BundleAdjust.h.
|
private |
rms of adjusted Longitude sigmas
Definition at line 407 of file BundleAdjust.h.
|
private |
rms of adjusted Radius sigmas
Definition at line 408 of file BundleAdjust.h.
|
private |
radians to meters conversion factor (body specific)
Definition at line 454 of file BundleAdjust.h.
|
private |
std deviation of unit weight
Definition at line 402 of file BundleAdjust.h.
|
private |
vector of a posteriori (adjusted image parameter sigmas
Definition at line 529 of file BundleAdjust.h.
|
private |
image parameter cumulative correction vector
Definition at line 522 of file BundleAdjust.h.
|
private |
image parameter solution vector
Definition at line 523 of file BundleAdjust.h.
|
private |
Up to three different maximum likelihood estimation models can be used in succession, these flags record if they are enabled .
Definition at line 687 of file BundleAdjust.h.
|
private |
This count keeps track of which stadge of the maximum likelihood adjustment the bundle is currently on.
Definition at line 692 of file BundleAdjust.h.
|
private |
Median of R^2 residuals.
Definition at line 701 of file BundleAdjust.h.
|
private |
Quantiles of the |residual| distribution to be used for tweaking constants of the maximum probability models.
Definition at line 697 of file BundleAdjust.h.
|
private |
number of columns (parameters) in normal equations
Definition at line 392 of file BundleAdjust.h.
|
private |
|
private |
number of constrained image parameters
Definition at line 378 of file BundleAdjust.h.
|
private |
number of constrained point parameters
Definition at line 377 of file BundleAdjust.h.
|
private |
degrees of freedom //!
Definition at line 379 of file BundleAdjust.h.
|
private |
number of 'fixed' (ground) points (define)
Definition at line 381 of file BundleAdjust.h.
|
private |
number of 'held' images (define)
Definition at line 383 of file BundleAdjust.h.
|
private |
number of 'held' observations (define)
Definition at line 384 of file BundleAdjust.h.
|
private |
number of 'held' points (define)
Definition at line 380 of file BundleAdjust.h.
|
private |
number of ignored points
Definition at line 382 of file BundleAdjust.h.
|
private |
index into normal equations of image parameter positions
Definition at line 396 of file BundleAdjust.h.
|
private |
number of image parameters
Definition at line 375 of file BundleAdjust.h.
|
private |
current iteration
Definition at line 369 of file BundleAdjust.h.
|
private |
array of Qs (see Brown, 1976)
Definition at line 515 of file BundleAdjust.h.
|
private |
maximum iterations
Definition at line 370 of file BundleAdjust.h.
|
private |
number of camera angle coefficients in solution
Definition at line 387 of file BundleAdjust.h.
|
private |
number of camera position coefficients in solution
Definition at line 390 of file BundleAdjust.h.
|
private |
number of image-related partials
Definition at line 371 of file BundleAdjust.h.
|
private |
number of point-related partials
Definition at line 372 of file BundleAdjust.h.
|
private |
number of image coordinate observations
Definition at line 373 of file BundleAdjust.h.
|
private |
reduced normal equations matrix
Definition at line 512 of file BundleAdjust.h.
|
private |
index into normal equations of point parameter positions
Definition at line 395 of file BundleAdjust.h.
|
private |
type of SpiceRotation interpolation
Definition at line 394 of file BundleAdjust.h.
|
private |
total number of point parameters (including constrained)
Definition at line 376 of file BundleAdjust.h.
|
private |
type of SpicePosition interpolation
Definition at line 393 of file BundleAdjust.h.
|
private |
number of rejected image coordinate observations //!
Definition at line 374 of file BundleAdjust.h.
|
private |
solve cad degree (define)
Definition at line 386 of file BundleAdjust.h.
Referenced by SetSolveCKDegree().
|
private |
solve spk degree (define)
Definition at line 389 of file BundleAdjust.h.
Referenced by SetSolveSPKDegree().
|
private |
|
private |
total number of parameters to solve for
Definition at line 391 of file BundleAdjust.h.
|
private |
'ControlNet' object
Definition at line 471 of file BundleAdjust.h.
|
private |
list of held image serial numbers
Definition at line 473 of file BundleAdjust.h.
|
private |
|
private |
list of observation numbers
vectors for statistical computations...
Definition at line 474 of file BundleAdjust.h.
|
private |
vector of apriori sigmas for 3D point parameters
Definition at line 526 of file BundleAdjust.h.
|
private |
vector of corrections to 3D point parameter
Definition at line 525 of file BundleAdjust.h.
|
private |
vector of weights for 3D point parameters
Definition at line 527 of file BundleAdjust.h.
|
private |
list of image serial numbers
Definition at line 472 of file BundleAdjust.h.
|
private |
array of NICs (see Brown, 1976)
Definition at line 519 of file BundleAdjust.h.
|
private |
spacecraft position solve type (define)
Definition at line 496 of file BundleAdjust.h.
|
private |
x residuals
Definition at line 479 of file BundleAdjust.h.
|
private |
xy residuals
Definition at line 481 of file BundleAdjust.h.
|
private |
y residuals
Definition at line 480 of file BundleAdjust.h.
|
private |
x errors
Definition at line 477 of file BundleAdjust.h.
|
private |
y errors
Definition at line 478 of file BundleAdjust.h.
|
private |
Control Net file specification.
Definition at line 464 of file BundleAdjust.h.
|
private |
output file prefix
Definition at line 466 of file BundleAdjust.h.
|
private |
solution method string (QR,SVD,SPARSE-LU,SPECIALK)
Definition at line 465 of file BundleAdjust.h.
|
private |
This class is used to reweight observations in order to achieve more robust parameter estimation, up to three different maximum likelihood estimation models can be used in succession.
Definition at line 671 of file BundleAdjust.h.